06-02-02 Backtracking line search
Gradient descent에서 고정 step size를 사용하게 되면 진행 속도가 항상 동일하기 때문에, 경사가 가파른 구간에서는 최적점을 지나쳐서 진동할 수 있으며 경사가 평평한 구간에서는 진행이 느려질 수가 있다. 따라서, 곡면의 특성에 맞춰 속도를 조절하면서 진행해야 수렴도 보장되고 수렴 속도도 높아진다. 이와 같이 곡면의 특성에 맞춰 step size를 적응적으로 선택하는 방법 중 하나가 backtracking line search이다.
Backtracking line search 방법이란?
이 방법은 다음 위치를 결정할 때 현재 위치에서 한 step을 가보고 너무 많이 갔다고 판단하면 다시 되돌아 오는 방법이다. 다음 그림은 backtracking line search로 다음 step을 결정하는 방식을 보여준다.
![]()
곡면 \(f\)에서 탐색 범위는 직선으로 제한된다. 아래쪽 점선은 현재 위치 \(x\)에서 접선 방향으로 한 step 간 경우이다. 이 경우 \(f\)가 항상 직선보다 위쪽에 있으므로 많이 간 것인지 적당히 간 것인지 자세히 판단하기가 어렵다.
Backtracking line search에서는 위쪽 점선을 사용한다. 위쪽 점선은 접선의 기울기에 \(\alpha\)를 곱한 방향으로 한 step 간 경우이다. 이때, 직선은 항상 \(f(x+t\Delta x)\)와 교차하므로, 한 step 간 지점에서 \(f(x+t\Delta x)\)의 위치가 점선 위에 있으면 너무 많이 갔다고 판단하고 \(f(x+t\Delta x)\)의 위치가 점선 아래에 있으면 적당히 잘 갔다고 판단한다.
너무 많이 간 경우에는 되돌아 오기 위해 \(t\)를 줄이고 \(f\)가 점선 아래로 오게 만든다. 이때 \(t\)의 위치는 \(0 \le t \le t_0\)구간 안으로 들어온다.
Backtracking line search 알고리즘
이 내용을 알고리즘으로 정리하면 다음과 같다. (단, \(\Delta x = - \nabla f(x)\))
- 파라미터를 초기화한다. (\(0 \lt \beta \lt 1\), \(0 \lt \alpha \le 1/2\))
- 각 반복에서 \(t = t_{init}\)로 초기화 한다. (\(t_{init} = 1\))
- 조건 \(f(x - t \nabla f(x) ) \gt f(x) - \alpha t \lVert \nabla f(x) \rVert_2^2\)을 만족하면 \(t = \beta t\)로 줄인다. 이 조건이 만족되는 동안 3을 반복한다.
- Gradient descent update \(x^+ = x - t \nabla f(x)\)를 실행한다.
- 종료 조건을 만족하지 않으면 2로 간다.
Backtracking line search은 단순하지만 매우 잘 실행된다. 파라미터 \(\alpha\)는 다음 step의 방향을 결정하며, \(\beta\)는 다음 step을 얼마나 되돌아 올 지 결정한다. \(\beta\) 값이 작으면 크게 되돌아 오기 때문에 3번 반복 회수는 적어지지만 step size가 작아져서 한번에 멀리 가지는 못한다. 실제 파라미터 선정은 알고리즘의 성능에 크게 영향을 주지 않으며, 대부분 \(\alpha = 1/2\)로 \(\beta\)는 1에 가까운 값으로 선정한다.
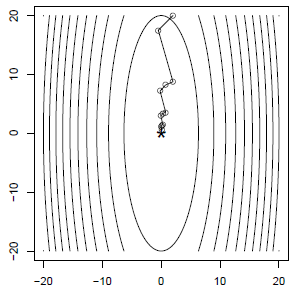
Backtracking line search 수렴 예시
Backtracking 방식으로 adaptive하게 step size를 선정하게 되면 fixed step size로 100 step만에 수렴했던 예제가 12 step만에 수렴한다 (\(\alpha = \beta = 1/2\)). 내부 backtracking step까지 포함해도 총 40 step만에 수렴한다.
The intuition of Backtracking line search
함수 \(f\)에 대한 quadratic approximator는 다음과 같이 정의된다. \(f(y) \approx f(x) + \nabla f(x)^T(y-x) + \frac{1}{2t} \vert \vert y - x \vert \vert_2^2\) 이때, \(y = x - t \nabla f(x)\)라 하면, \(\begin{align} f(x - t \nabla f(x)) &\approx f(x) + \nabla f(x)^T (x - t \nabla f(x) - x) + \frac{1}{2t} \vert \vert x - t \nabla f(x) - x \vert \vert_2^2 \\ &= f(x) - t \vert \vert \nabla f(x) \vert \vert_2^2 + \frac{1}{2t} \vert \vert -t \nabla f(x) \vert \vert_2^2 \\ &= f(x) - t \vert \vert \nabla f(x) \vert \vert_2^2 + \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2 \\ &= f(x) - \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2 \end{align}\)
즉, \(f(x) - \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2\)는 \(f(x - t \nabla f(x))\)의 quadratic approximator이다. 이 두 함수 사이의 부등호 방향에 따른 기하학적인 의미를 살펴보자. (빨간선: \(f(x - t \nabla f(x))\), 파란선: \(f(x) - \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2\))
(1) \(f(x - t \nabla f(x)) < f(x) - \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2\)
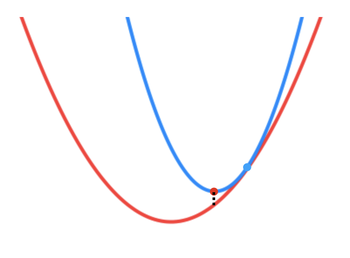
Quadratic approximator가 \(x - t \nabla f(x)\)에서 더 위에 위치하는 형태이다. Quadratic approximator의 solution에 접근하면 \(f(x)\)의 solution에 더 가까이 접근할 수 있음이 보장된다.
(2) \(f(x - t \nabla f(x)) > f(x) - \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2\)
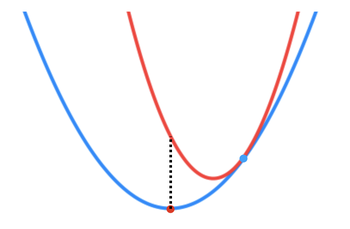
(1)의 경우와는 반대되는 양상을 보인다. Quadratic approximator의 solution을 통해 \(f(x)\)의 solution에 더욱 접근할 수 있음이 보장되지 않는다.
결론: 매 스텝에서 t 값을 잘 조정하여 항상 \(f(x - t \nabla f(x)) \leq f(x) - \frac{1}{2}t \vert \vert \nabla f(x) \vert \vert_2^2\)를 만족하도록 하면 훨씬 효과적으로 \(f(x)\)의 solution에 접근할 수 있다.